Ha megnézte a Mars Reconnaissance Orbiter nagyfelbontású képeit, vagy esélyt kapott az új Google Mars felfedezésére, akkor tudja, hogy a Mars tele van kráterekkel, hegyekkel, sirályokkal és mindenféle érdekes - és veszélyes - terepen . Az olyan területek, mint például a réteges lerakódások, üledékek, repesztések és törések, csak azok a helyek, ahol a Marson termelődő metán forrásait kell keresni. De túlságosan kockázatos, ha a jelenlegi stílusunkat, beleértve a 2011. évi Mars Science Laboratory-t (MSL), áruló terepre juttatjuk. A JPL mérnökei, valamint a kaliforniai Technológiai Intézet hallgatói egy sokoldalú, kis tömegű robotot terveztek és teszteltek, amelyet hozzá lehet adni nagyobb meghajtókhoz, például az MSL-hez, amely képes a sziklák lerombolására, váratlanul haladni a meredek és sziklás terepen, és felfedezni mély kráterek.
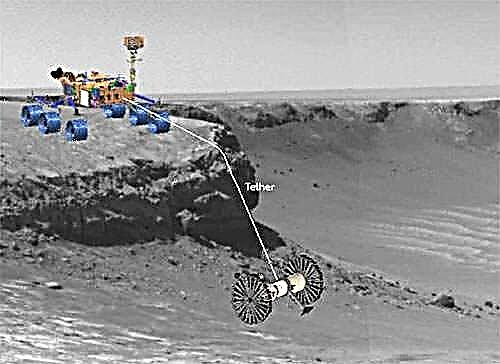
Ez az Axel nevű router prototípus segítséget nyújthat a jövőbeni robot űrhajóknak a külföldi világok, például a Mars jobb felfedezésében és felderítésében. A Földön Axel segítséget nyújthat mentési és mentési műveletekben.
"Az Axel kiterjeszti azon képességünket, hogy felfedezhessük olyan terepeinket, amelyeket korábban még nem tudtunk felfedezni, mint például függőlegesen lejtős előtétekkel ellátott mély kráterek" - mondta az Axel vezető kutatója, Issa A. D. Nesnas, a JPL robotika és mobilitási szakasza. Az is, hogy az Axel viszonylag kis tömegű, a misszió számos Axel rovert szállíthat. Ez lehetőséget adna arra, hogy agresszívebbé váljunk a vizsgált terepen, miközben az általános kockázat kezelhető marad. ”
Nesnas szerint az Axel olyan, mint egy yo-yo - egy nagyobb roverhez rögzített hevederre fekszik, és felmehet és lefelé haladhat a kráterek, kanyonok és sirályok oldalán, felfedezve a többi rover számára nem biztonságos területeket.

Az Axel egyszerű és elegáns kialakítása, amely mind fejjel lefelé, mind jobb oldalával felfelé képes működni, csak három motort használ: az egyik a két kerék mindkét irányításához, a harmadik pedig a kar irányításához. A karban van egy gombóc, amellyel hold- vagy bolygóanyagot gyűjthetnek a tudósok tanulmányozására, és beállítja a robot két sztereo kameráját is, amelyek 360 fokban dőlhetnek el.

Az Axel hengeres testének számítástechnikai és vezeték nélküli kommunikációs lehetőségei vannak, és inerciális érzékelője képes az autonóm működésre. Ezenkívül olyan hevedert is rögzít, amelyet az Axel nem tud leengedni egy nagyobb landolóról, roverről vagy rögzítési pontról. A rover különféle típusú kereket használhat, a nagy összecsukható kerekektől a felfújható kerekekig, amelyek segítenek a rovernek elviselni a kemény leszállást és kezelni a sziklás terepet.
Az Axel 1999 óta fejlesztés alatt áll, és a Caltech, a Purdue Egyetem és az Arkansas Tech University egyetemi hallgatói az évek során együttműködtek a JPL-vel e sokoldalú rover kifejlesztése érdekében.
Az Axelről további információt a JPL Axel oldalán és a Caltech Axel webhelyén talál.