A Szellem és a Lehetőség a Vörös Bolygót egyelőre magának engedi, de az ESA tervezi, hogy egy saját roverot küld a Mars felszínének feltérképezésére. Ahelyett, hogy bizonyítékokat keresne a múlt vízéről, az ExoMars az élet nyomait keresi majd, mind a múlt, mind a jelen jelenlétében. Ha minden jól megy, az ExoMars 2011-ben indul a Marsra.
Az ESA ambiciózus, hosszú távú Aurora felfedező programjának részeként az ExoMars az élet nyomát fogja keresni a Marson. A küldetéshez teljesen új technológiákra van szükség az önvezérelt robotokhoz, a beépített autonómiához és a legmodernebb vizuális terepi érzékelőkhöz.
A század negyedik évtizedében láthatták, hogy Európa részt vesz a Mars felé tartó, személyzettel ellátott misszióban, amely az emberiség egyik legnagyobb űrrepedíciója volt.
Az Aurora az ESA olyan programja, amely a Naprendszer hosszú távú robotikus és emberi kutatására irányul, fő célpontjai a Mars és a Hold.
Az emberi küldetés a Vörös Bolygó felé egy nagy, több éves vállalkozás lenne, amely fantasztikus, teljesen új képességeket igényel, például automata teherhajókat, előre beállított eszközöket és eszközöket, valamint a Mars földi pályáján lévő kommunikációs és navigációs műholdakat, hasonlóan a Föld jelenlegi GPS-rendszereihez.
A tudósok és a mérnökök már dolgoznak az ESA első robot „előfutára” küldetésén, az ExoMars-en, amelyet 2011 körül indítanak.
Az ExoMars megvizsgálja a Mars biológiai környezetét a további robot- és később emberi tevékenységek előkészítéseként. A misszióból származó adatok felbecsülhetetlen hozzájárulást nyújtanak az exobiológia szélesebb körű tanulmányozásához - az élet kutatásához más bolygókon.
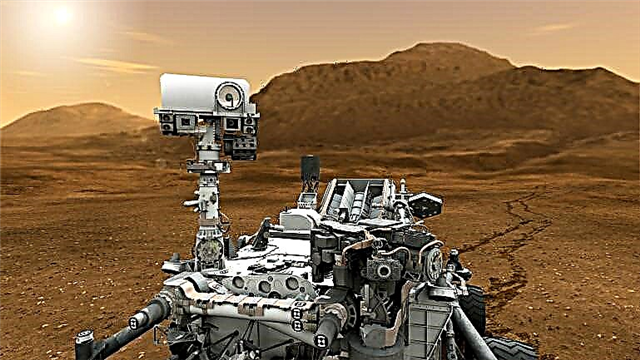
A misszió fõ eleme egy kerekes, robotgépjármû, amely koncepciójában hasonló a NASA jelenlegi Mars Rover küldetéséhez, de eltérõ tudományos célokkal és jobb képességekkel rendelkezik.
"A klasszikus közvetlen irányítási módszerek csak akkor nem működnek, ha a Mars felszínén nem strukturált környezetben működünk."
A rover napelemes tömböket fog felhasználni villamosenergia-előállításhoz, és a Mars sziklás narancssárga-vörös felületén halad át, akár 12 kilogrammnyi tudományos hasznos teher szállításával, amely magában foglalja a legelső könnyű fúrórendszert, valamint egy mintavételi és kezelési eszközt, és egy tudományos eszközkészlet a múlt vagy jelen élet jeleinek keresésére.
A távolság elmaradása és a bonyolultság miatt az ExoMars „intelligens” elektro-optika segítségével navigál önmagában, hogy vizuálisan érzékelje és értelmezze a környező terepet, és képes lesz önállóan működni intelligens fedélzeti szoftver segítségével.
Az automatikus vezérlés jelentős előrelépést jelent
Ez az automatizált üzemmód jelentős előrelépést jelent az ESA számára, amelyet már régóta használnak az űrhajók közvetlen emberi vezérlőkkel történő irányítására. És nemcsak új lesz a rover fedélzeti vezérlőrendszere.
"Az ExoMars teljesen új technikákra és technológiákra lesz szükség a Föld alapú rovervezérlő rendszer több szempontja szempontjából, nem csupán a mai fejlesztésünkhöz" - mondja Mike McKay, az űrhajók vezető vezetője és a Mars szakértője, az ESOC, az ESA űrhajó-műveleteinek székhelye. Központ, Darmstadt, Németország.
Az ESA vezérlői soha nem végeztek olyan missziót, amely egy másik test felületén haladt; Huygens - amely 2005-ben sikeresen megérintette a Titánt - légköri szonda volt, nem pedig landoló, bár rövid ideig működött, miután elérte a Titan felületét.
Robot feladat: a terep kilométereinek átvitele az élet keresése érdekében
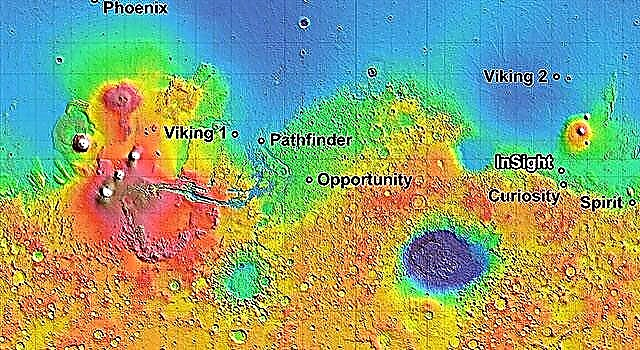
A rover autonóm működésének egyik tipikus példájában a földi irányítók magas szintű parancsot állíthatnak fel, mondván, hogy tudományos szempontból érdekes helyre kell haladnia 500–2000 méter távolságra, és tudományos műveleteket folytat, például a felszín alatti fúrást a talaj mintavételéhez. az élet jeleit. De a jármű önmagában kezeli a mozgás részleteit.
3D-s kamerával felmérné a talajt, létrehozna egy digitális terepmodellt, igazolja annak jelenlegi helyét, elvégezné a belső szimulációkat, majd autonóm döntést hozna az elérhető út legjobb útjáról, akadályok, a rover jelenlegi állapota és kockázati / erőforrás-megfontolások alapján .
- Akkor elviszi magát a célhoz. Arra számítunk, hogy a célpontos pontosság 20 méteres átmérőn belül fél méteren belül lesz - mondja Bob Chesson, az ESA Műveleti Igazgatóságának az Űrrepülés és Kutatási Osztály vezetője.
Az ExoMars nyereségét kapja a jelenlegi robotikutatók
A robot következő generációjaként az ExoMars a jelenlegi generáció tanulságaiból profitál majd, beleértve a NASA Mars Explorer Rover (MER) küldetését. "Nem félénk megpróbálni megtanulni testvéreink tapasztalatait" - mondja Chesson.
„Az ExoMarsnak meg kell változtatnia a kultúrát; fejlesztenünk kell egy valóban interdiszciplináris műveleti koncepciót. ”
Innovatív földi irányítás az autonóm működés lehetővé tétele érdekében
Az ExoMars esetében a földi vezérlők valószínűleg egy „rover dedikált vezérlőhelyiségben” helyezkednének el, koncepciójában hasonlóan a dedikált vezérlőtermekhez (DCR), amelyeket az ESA most a bolygókat keringő egyéni missziókhoz állít fel.
Az ESOC a misszió műveleteinek teljes irányító központja (MOCC) lesz, amely irányítja a felszállás és a korai pálya fázist (LEOP), a Mars felé tartó utazást, a leszállási modul és a rover kijárat elválasztását és leszállását, a rover felszíni műveleteinek valószínű kezelésével. az ALTEC-nél, az Advanced Logistic Technology Engineering Center-nél található Rover Műveleti Központtól kell elvégezni, Torino, Olaszország.
„A rover földi irányítórendszerének vagy a földi szegmensnek a kialakítása a rover tudományos és működési céljaitól függ, amelyek még nem véglegesek, tehát a földi rendszer továbbra is fejlődik” - mondja Chesson. "Elvileg az alapvető telemetriai és távvezérlő funkciók alapvetően megegyeznének a mostani funkciókkal, de lényegesen új lehetőségekkel rendelkezik, amelyek lehetővé teszik a rover autonóm működését."
„Hagyjuk a gyermeket sétálni”
A földi irányítórendszernek legalább olyan számítási eszközökre van szüksége, amelyek lehetővé teszik a magas szintű küldetés-tervezési eszközöket, és lehetővé teszik a rover digitális terepének és 3D modellezésének figyelését, a talajút és a pálya tervezését, a földi szimulációt és a szoros integrációt a hasznos teher ellenőrzésével és a tudományos ismeretekkel tevékenységek.
"A klasszikus közvetlen irányítási módszerek csak akkor működnek, ha a Mars felszínén nem strukturált környezetben és jelentős jel-késleltetés mellett működünk" - mondta Reinhold Bertrand, az ESOC tervezőmérnöke és robotikus szakértője. „Az ExoMarsnak meg kell változtatnia a kultúrát; „hagyjuk, hogy a gyermek egyedül járjon”, miközben kidolgozunk egy valóban interdiszciplináris műveleti koncepciót. ”
Eredeti forrás: ESA sajtóközlemény